
GAMES202记录
Lec 3: Shadow Mapping
Recap: shadow mapping
在101中闫老师已经介绍股了shadow mapping,这是一个2pass的算法,即我们会对场景渲染两次
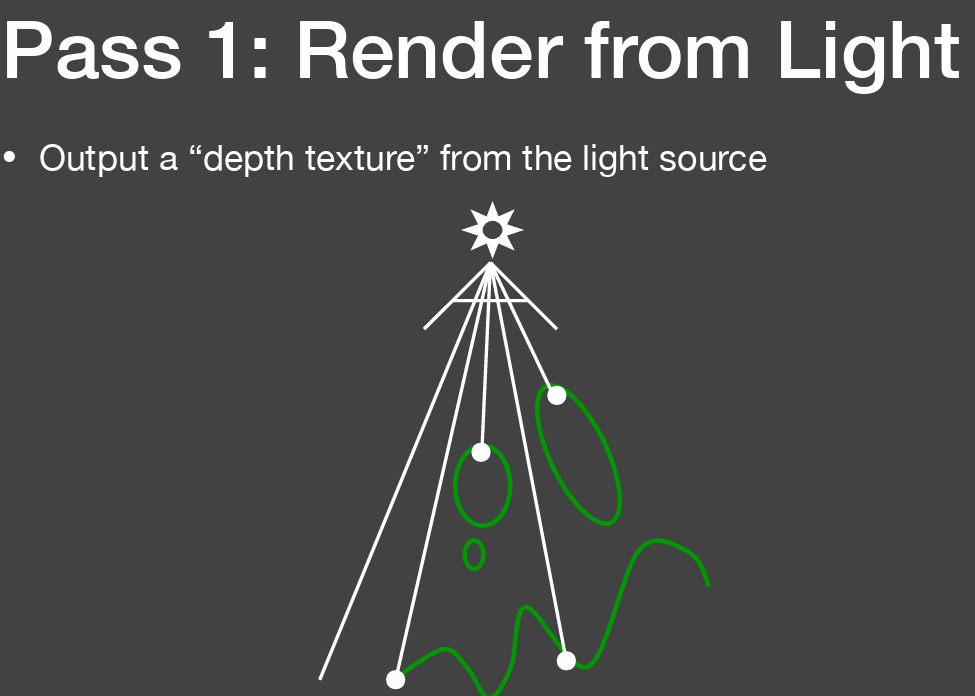
1-pass我们从Light处看向场景并输出一个从light处看向场景所生成的深度图,也就是所谓的shadow map.
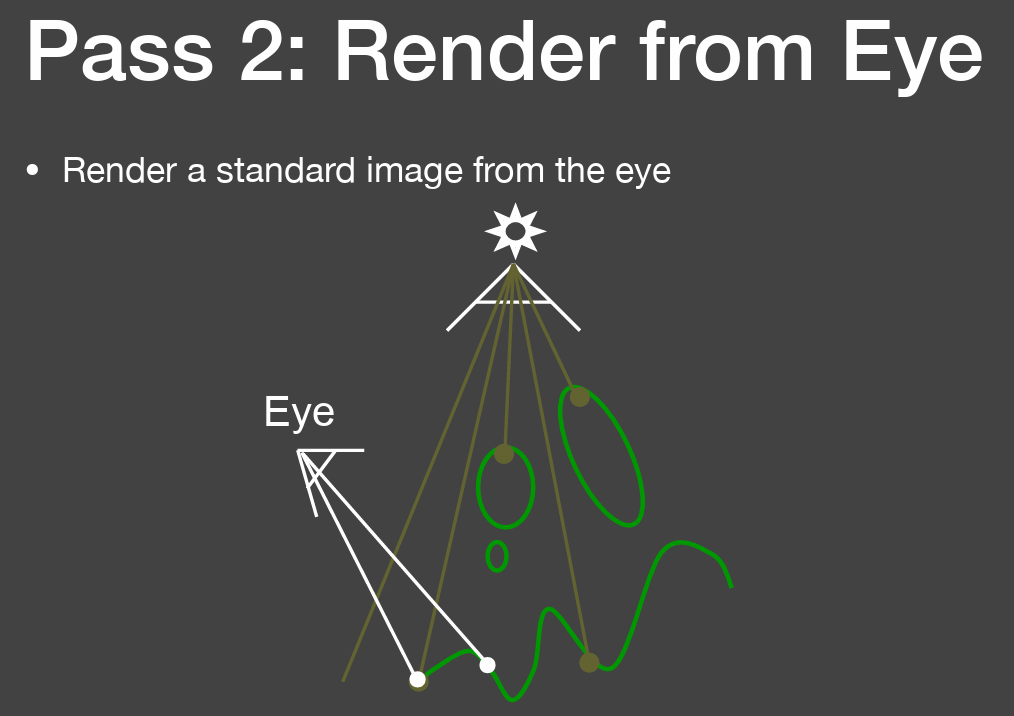
2-pass我们从camera处看向场景渲染一遍将,并参考1-pass生成的shadow map去判断物体是否在阴影中.
shadow mapping是一个完全发生在图像空间的算法,优点在于:一旦shadow map已经生成,就可以用来获取场景中的几何表示
缺点会产生自遮挡和走样
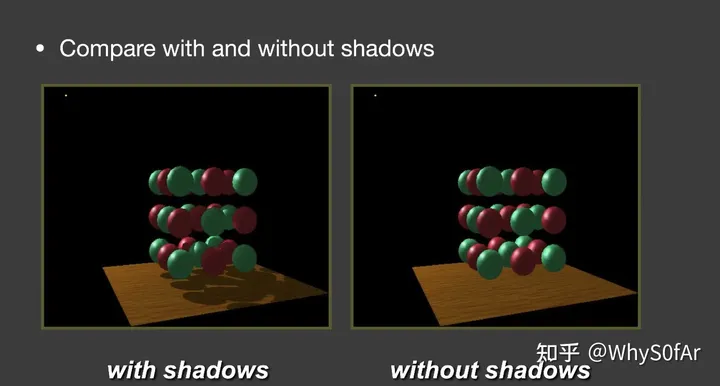
根据这个最基本的2-pass方法,我们可以得到如下的阴影表现
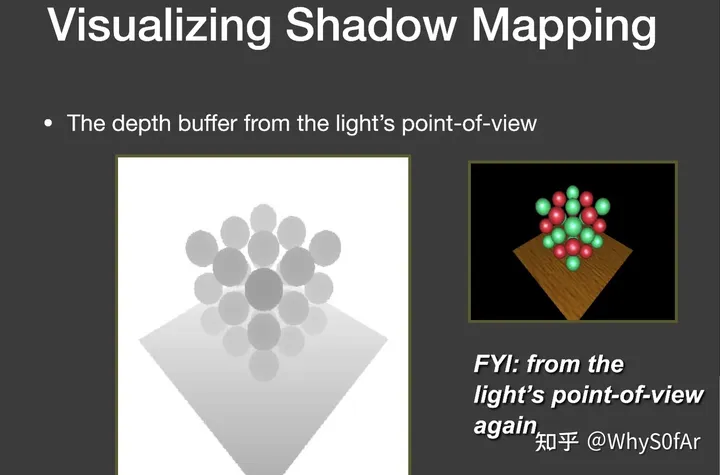
从Light处看向场景生成的是shadow map,并不是Shading的结果,而是在light的pass中生成一张深度的buffer,如图中,颜色深的表示值比较小,也就是离light近,颜色浅的就是离light远,值大.
这样的shadow mapping有一种基本的问题:自遮挡
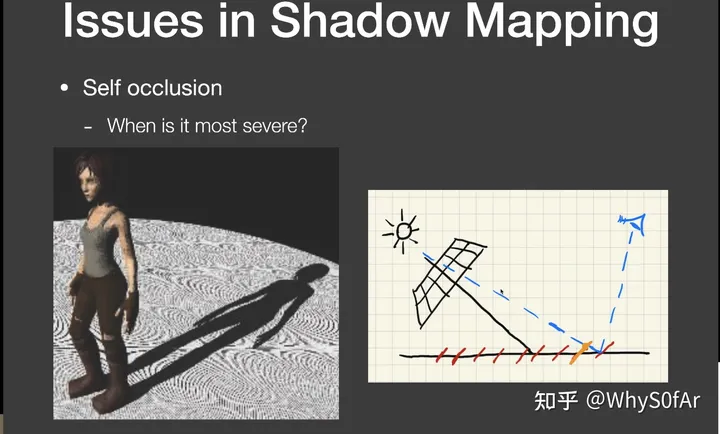
我们生成了一个Shadow map,那么这个Shadow map肯定有自己的分辨率,其每个像素要记录它所看见的最浅深度,可以理解为,每个像素内部他的深度是一个常数
在Shadow map看来,场景被离散化为一系列红色小片形成的场景而不是直接的平面.
因为每个红色小片所代表的深度不一样,因此在2-pass,也就是从camera处看向场景时,后面的红色小片在连接light时,会被误认为被前面的红色小片遮挡住,从而产生了错误的阴影,这个现象在light与平面趋于平行时候最严重.
当一个点深度大于记录深度的值超过一个阈值时,我们才认为这个点在阴影内。这也是工业界使用较多的一个办法。

不过会因此丢失掉一部分的阴影
因此想出来进一步的解决方案:
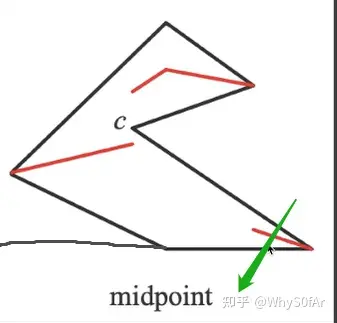
Second-depth shadow mapping
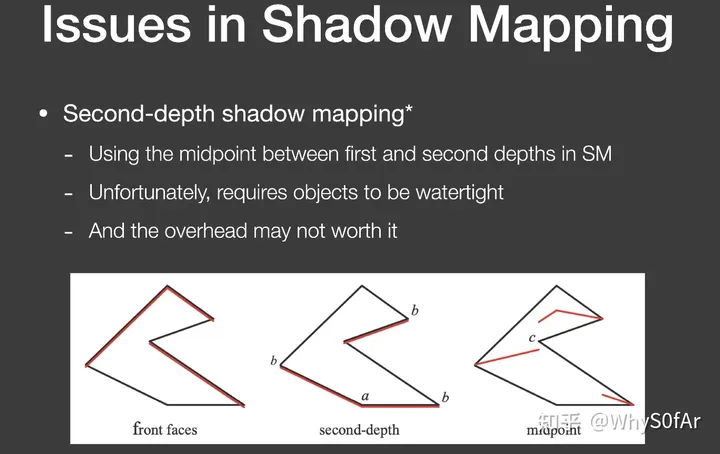
假设一根光线照过来,我们不用最小深度来比较,而是用由最小和第二小深度所得到的红色线来做后续的阴影,此处就没有Bias的事情了
然后实际中并没有人去使用这个技术,因为场景内的物体必须都是watertight(非面片),还有就是算的复杂,开销太大,实时渲染不相信复杂度。
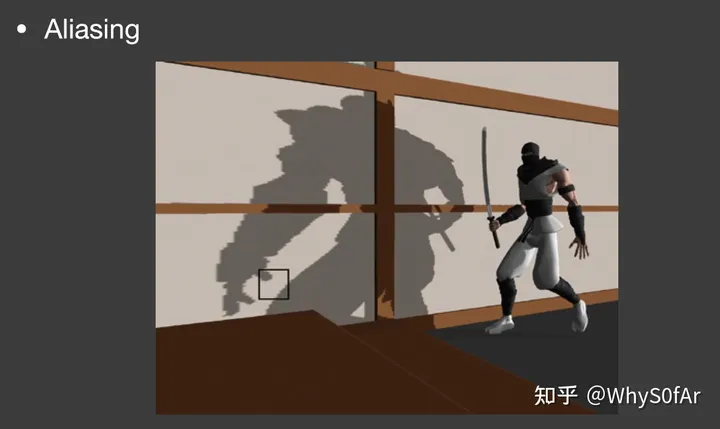
shadow mapping存在的第二个问题就是走样
所以我们可以考虑一些近似相等的情况,运用微积分的不等式(没有那么精确的要求)

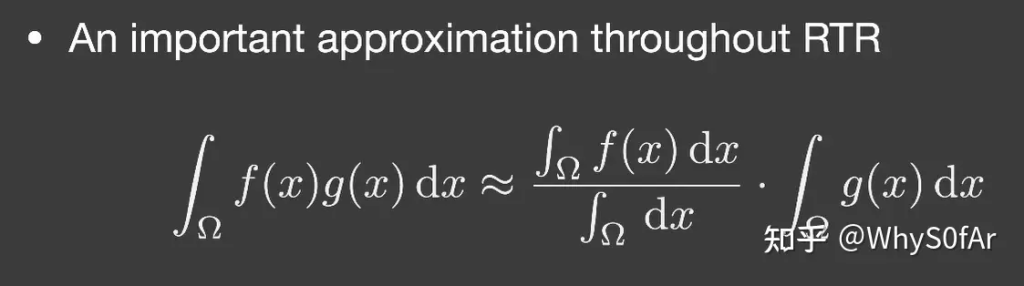
这是实时渲染中一个相当重要的近似,即两个函数乘积的积分 ≈ 两个函数积分的乘积
分母这一项的作用是为了保证左右能量相同而做的归一化操作。
我们来用一个例子来解释这个归一化操作。我们假设f(x)是一个常值函数,也就是f(x) = 2,我们的积分域恒为0-3.
那么约等式左边,把f(x) = 2代入,则可以提出来变为2倍的g(x)积分
而等式右侧第一个函数代入f(x)的积分是2 * 3 =6,分母的积分是3,结果也正好是2.正好也是2倍的g(x)积分.
那么什么时候这个约等式比较正确呢?
a) 我们要控制积分域足够小,也就是说我们只有一个点光源或者方向光源。
b) 我们要保证shading部分足够光滑,也就是说brdf的部分变化足够小,那么这个brdf部分是diffuse的。
c) 我们还要保证光源各处的radience变化也不大,类似于一个面光源。
相比于硬阴影,软阴影明显有更加突出的效果,为了实现软阴影的效果,我们首先会用一个工具PCF
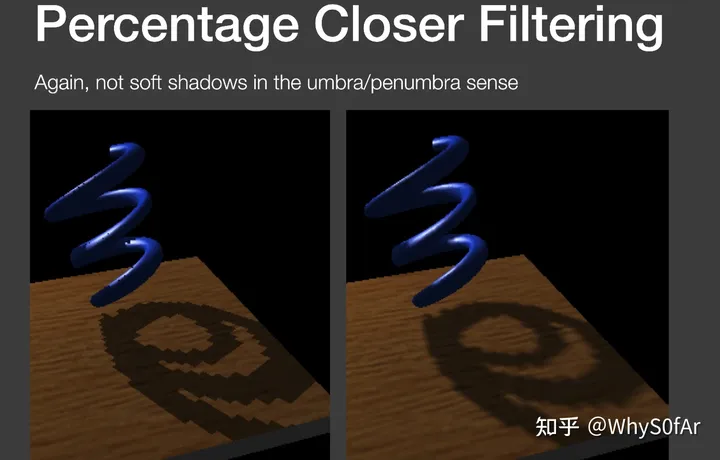
如果直接在shadow map上filtering就会造成阴影和物体交界直接糊起来,而且在第二个pass上做深度测试还是非0即1的结果,最后得到的仍然是硬阴影。
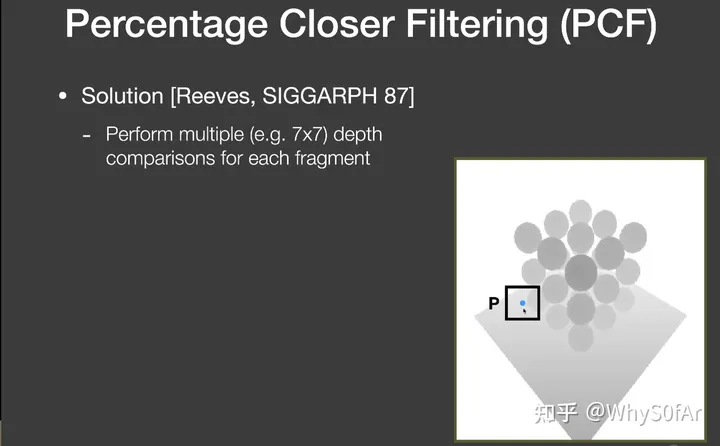
如图,蓝点是本来应该找的单个像素,现在我们对其周围3 * 3个像素的范围进行比较,由于是在Shadow map上,因此每个像素都代表一个深度,我们让在shadow map上范围内的每个像素都与shading point的实际深度进行一下比较,如果shadow map上范围内的像素深度小于shading point的实际深度,则输出1,否则输出0.
因此,我们要解决的一个问题是我们如何决定一个软阴影的半影区。换句话说,就是filter size 有多大的问题:
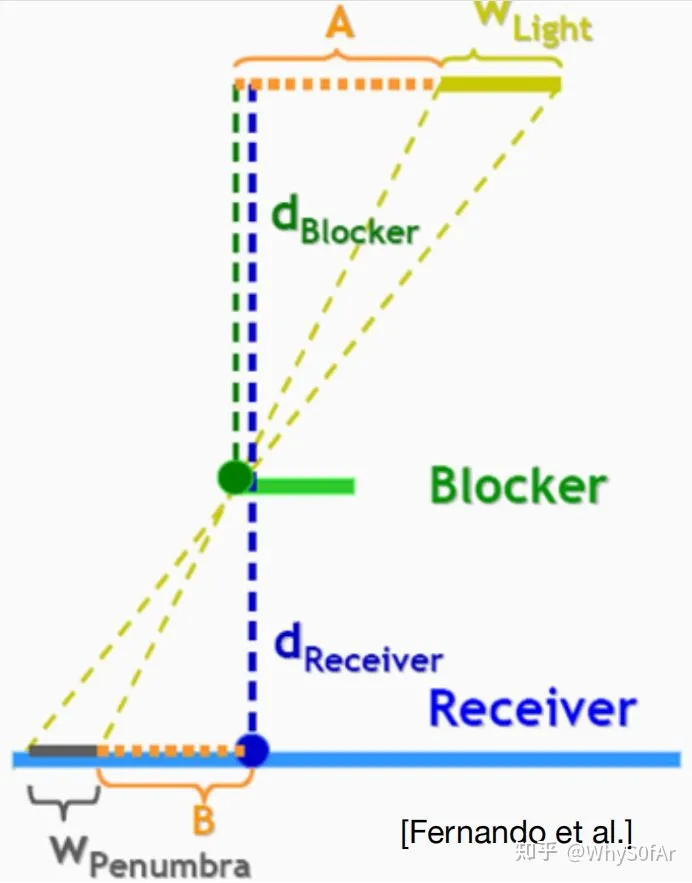
阴影接受物与阴影投射物的距离越小,阴影越锐利

不能直接使用shadow map中对应单个点的深度来代表blcoker距离,因为如果该点的深度与周围点的深度差距较大(遮挡物的表面陡峭或者对应点正好有一个孔洞),将会产生一个错误的效果,我们选择使用平均遮挡距离来代替,所以平常我们指的blocker depth其实是Average blocker depth.
